@ilya Thanks a lot of the video!
Yes, I have no problem with how to use it, the issue I think it might be my configuration, for example, when you used the reach antenna, how did the configuration looked on the mountpoints.yml?
@ilya Thanks a lot of the video!
Yes, I have no problem with how to use it, the issue I think it might be my configuration, for example, when you used the reach antenna, how did the configuration looked on the mountpoints.yml?
Hi!
I created my mountpoint using the same example from the documentation website:
- mount-point: BCEP00BKG0
password: 12345
description:
identifier: Barcelona
format: RTCM 3.2
format-details: 1006(15),1008(15),1013(60),1019,1020,1033(15),1075(1),1085(1),1095(1),1230(15)
carrier: 2
nav-system: GPS+GLO+GAL
network: EUREF
country: ESP
latitude: 41.41
longitude: 2.00
nmea: 0
solution: 0
generator: LEICA GR10
compr-encryp: none
authentication: B
fee: N
bitrate: 6200
misc: RGP, Ville de Cannes
What are the sections I need to change to ensure proper configuration and that it matches my ntrip server device? how can I actually get the configuration from my device?
For my ntrip server I'm using a swiftnav piksi board and rpi connected via ethernet and the rpi is doing a str2str from the tcp port. The swiftnav is set to send RTCMv3 messages from the ethernet port.
When trying the mountpoint in ucenter I'm not able to get a 3D RTK fix...
How can I know my configuration is correct?
This is showing my solution from ucenter:
And this is how it changes if I use a rtk2go server:
Thanks a lot!!
Hi!
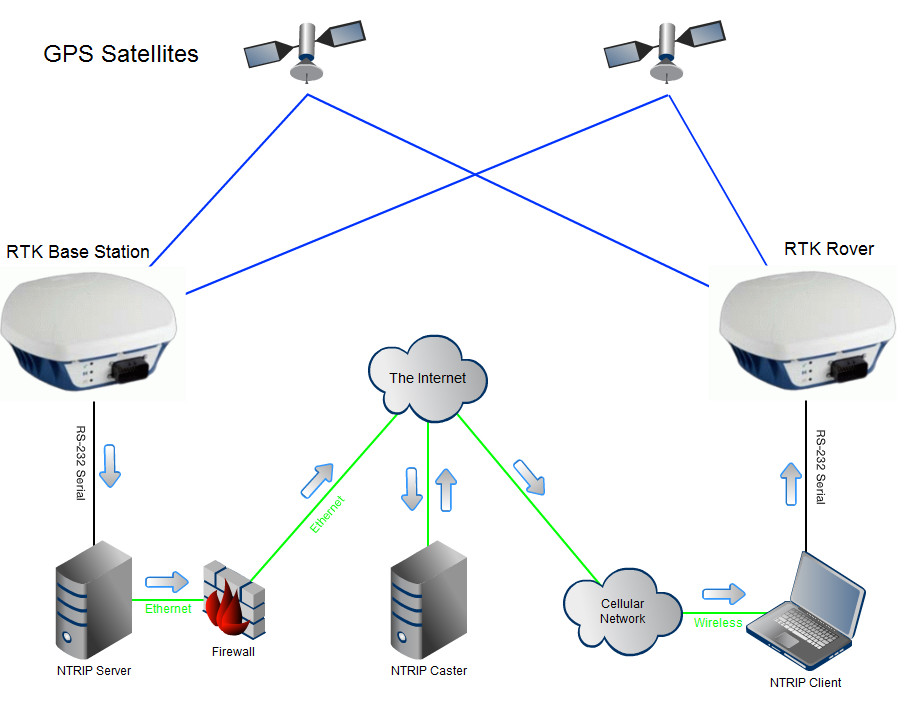
I'm creating an rtk solution using a raspberry pi thats connected to the internet and also connected to a GPS device. I'm trying to follow this architecture: http://lefebure.com/articles/ntrip-caster-setup/caster1.png
I also have a cloud server that will be the one running yccaster and actually providing the service to the rovers. So, the GPS data will go from the rpi to the cloud and then from the cloud to the rovers...
So, if I understand correctly, yccaster is the one that manages users and sends the ntrip data to the rovers right? can it also act as the server? This means I need to have a yccaster installation in the rpi and another one in the cloud? or do I need another process in the rpi??
Thanks a lot!
{kind=link}